Abstract— Public transportation is one of the
main means of transport utilized by the population, however it is still
inefficient. One of the problems seen by the population is the delay of the
bus. This can happen for several reasons such as traffic or accidents on the
road. Tracking a bus through GPS and GSM/GPRS can help solve some of the
problems related to lack of predictability of arrival, through the planning and
management of the bus system. This project proposes the development of a public
transportation tracking system, which will estimate the arrival of a bus at a
desired bus stop by the passenger as well as allowing the passenger to see the
bus in real time. Thus, the passengers will have better control over their
time. For this to become a reality, the tracking system will be integrated and
programed into a hardware module to determine the location of the vehicle and a
mobile application to visualize the bus on a map. It is expected to make public
transport an efficient means of transport, where the user can better plan, due
to more accurate itinerary, and the bus company can make more concise decisions
in regards to route timing.
1. Introduction
Over the last few years, the number of vehicles on the streets
of Brazilian cities have increased considerably. This increase was a
consequence of tax incentives granted to the population (Lerner, 2009, p.42).
According to Lerner (2009: 42), annual car sales increased between 1995 and
2000 and doubled sales of motorcycles (to 500 thousand a year). The increase
also occurred until 2005, thus reaching 1.6 million motorcycles in 2007
(Lerner, 2009, p.42) and around 3.8 million in 2015 according to DENATRAN
(2015). This increase resulted in losses in urban mobility and in the increase
of the emission of gases harmful to the environment.
According to Lerner (2009, page 43), the level of pollution
per passenger when using a car is 17 times higher than when using buses. A
motorcycle pollutes 32.3 times more than the bus.
Although public transportation is one of the main means of
locomotion used in Brazil, with about 29% of total motorized journeys in the
Brazilian metropolitan regions (ANTP, 2013), it is inefficient and imposes on
users due to long waiting and overcrowding. One of the main problems witnessed
by the population is the delay of the buses, which can happen for a multitude
of reasons.
New technologies have been applied in different sectors of
society for the improvement of several segments, and the same must happen for
public transport, in which decision-making management systems are being
developed and used worldwide.
The use of technological tools such as tracking can ease the
problems related to the lack of predictability in the public urban transport.
New tools have been used to improve services related to public transport in
several countries, such as the United States, Australia and England (MAGALHÃES,
2008, p.23). As examples of tools, we can mention are Radio Frequency
Identification (RFID), bus tracking via Global Positioning System (GPS) and
Global System for Mobile Communications (GSM).
Assisted by the low cost of smartphones and the availability
of 3G and 4G networks, the number of smartphone users is growing at an average
rate of 4.7% per year (BYANSHUL SRIVASTAVA, EMARKETER, 2014). Although the
growth rate of mobile phone users has reached a ceiling in developing
countries, with the growing number of users in Asia, the Middle East and
Africa, 4.5 billion users are soon expected. A report by market research firm,
eMarketer, expects the growing market in emerging countries to boost the
smartphone market (BYANSHUL SRIVASTAVA; EMARKETER, 2014). Aiming at the growing
number of smartphone users allied to tracking technology, there is a great
prospect for the development of a project that can contribute to the
improvement of public transportation.
Through the planning and management of the fleet, it
becomes possible to create new means of organization for public transport
companies. From the use of a tracking system, it is possible to have greater
control over a particular line or fleet, both by the company and by the
passenger. It is also possible to determine the time of arrival of a bus to the
next stop, the time of the route, in which stops the bus did not stop, average
speed, etc.
The objective of this project is to develop a system that
allows the users of public transportation to track the bus via smartphone, as
well to be able to have an estimate of the time of arrival at each stop.
The tracking system proposed in this project has already been
utilized by other research groups for different purposes such as vehicle
tracking, anti-theft and intelligent tracking management. Maurya (2012)
proposed a vehicle tracking system using GPS and GSM technology for anti-theft
system. The anti-theft system is connected to a vehicle to monitor its movement
and report the status of the vehicle, while its positional data is sent to a
server and a mobile device. Dinkar (2011) developed a Web-based GPS-GPRS
vehicle-tracking system. The Web tracking system developed in this reference
project utilized different technologies such as PHP, JavaScript, XML and MySQL
with Google Map API to retrieve and display the vehicle’s position on the maps.
According to (Chadil et al., 2008) his work proposed a real-time tracking
system using a client-server model, with the client having an embedded device
with a GPS/GPRS module to identify device location. The server is a personal
computer with a Web server program that receives the location information to
display on the Google Map and Google Earth software.
2. Proposed method
The methodological sequence used to model the
public transport tracking system through an embedded system, web system and a
smartphone application is presented in the Unified Modeling Language (UML)
activity diagram in Fig. 1.


Fig. 1. Methodological sequence for the modeling of the public transport
tracking system.
As shown in Fig. 2., the data stream begins with the GPS
satellite that requires at least three satellites to triangulate the exact
position of the device. Once the satellites are triangulated it is possible to obtain the position using a
GPS receiver (HEGARTY, 2012). When the GPS receiver picks up its own position,
a microcontroller communicates with the receiver. Therefore, the
microcontroller reads this position and creates an HTTP request to send the
position obtained to the server (WESTERMO, 2005). The sending of the position
uses the GSM/GPRS cellular network. To process this request, a page on the
server is invoked with the object's position and other parameters such as time
and number of satellites, then a collection of scripts will process and store
the position of the object. After the object's position is stored in the
database, the passenger can request the time of arrival of the vehicle using a
smartphone. When the passenger requests the time of arrival of a bus, a Web
page is invoked on the server to restore and estimate the arrival time of the bus in the requested
stop.
With the requirements well defined, the project was modeled
and the pilot project was tested. Then, with the results of the pilot project,
the previously modeled model was adjusted until the final objective was
obtained.
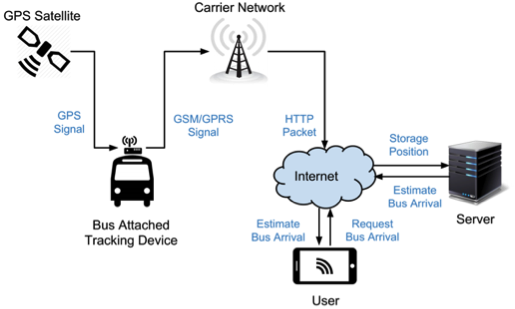
Fig. 2. Overview of bus tracking system.
3. Project implementation
This topic presents the steps for implementation of this
system. First, the technologies used and the project’s schema are described,
then the development of the system, and finally, the pilot project in detail.
3.1. Definition of tools and technologies
In the development of the hardware, a device was used which
integrates a GPS module that allows the location of a vehicle, person, or other
object to be determined at regular intervals. The obtained localization data
for bus routes was transmitted to a database server via GSM/GPRS technologies.
Subsequently, the position information was then plotted on a map to view the
movement of the bus.
In this project the Arduino Uno R3 was used. The Arduino was
responsible for setting up the GPS/GSM/GPRS device, reading the GPS location
and sending the location to the server using GSM/GPRS technology. The Arduino
used had an integrated ATmega328P
microcontroller, enabling communication with the GPS/GSM/GPRS device.
The SIM808 device used was a complete Quad-Band GSM/GPRS
system that combines GPS technology for satellite navigation. This hardware
device depends on a voltage source to supply at least 2 amps to power the
Arduino Uno R3 and SIM808.
The software used to program the Arduino, compile and transfer
the code to the microcontroller, was an open source program called the Arduino
Software Integrated Development Environment (IDE).
For the development of the Web platform, the following
programming languages and technologies were used: Python/Django, JavaScript,
HTML, CSS, Bootstrap and Leaflet. These technologies are widely used because
they offer fast implementation and easy maintenance. As an example, the Django
framework that is used for agile development, which is based off of the Python
language, uses standards for object-oriented programming and other design patterns (RICHARDSON; RUBY,
2008).
3.2. Patterned architecture
Fig. 3 shows the
web architecture for the public transport tracking system. In web architecture,
technologies and protocols are used for the development of the web system and
the mobile application. The data is requested through the user interface using
OpenShift webserver and HTTP protocol,
then the data is returned in JSON format. The web interface was programmed
using the following technologies: HTML5, CSS, Javascript, Leaflet and
bootstrap. The Android application has been programmed in native language of
the Java system.
PostgreSQL was used
as the Database Management System (DBMS) and its spatial extension (PostGIS)
for PostgreSQL positions storage.

Fig. 3. Web architecture of public transit tracking system.
3.3. Database development - entity-relationship
model
The entity-relationship model (ER model) of the database is
represented in Fig. 4, in this model nine tables were created in
Entity-Extended Relationship (EER) notation. The tables are related so that
they guarantee the integrity of the data.
The tables "geoPosition" and "busStop"
contain position columns of geographic data. Geographic data can use its
existing functions, such as calculating the distance between two geographic
points and also select data in specific regions.

Fig. 3. Model ER.
3.4. System development
A map was developed using LeafLet framework in the city of
Bagé-RS in Brazil with a route line. The map is composed of layers in which the
bus stops and the direction of the line were plotted. Fig. 4 shows the
developed map.

Fig. 4. Map of the line Damé x Malafaia of the company Stadtbus
of the city of Bagé-RS.
The passenger is able to click on the bus stop to obtain the
information on the bus arrival. Fig. 5 shows the information on a bus stop.
This information is: vehicle id, stop name, existence of metal shelter,
existence of concrete shelter, existence of curb, painting of the shelter,
existence of signs, photos and the bus arrival.

Fig. 5. Information on bus stops to be shown to passengers.
To speed up the process of creating the application, the
Bootstrap framework was used. The Bootstrap framework is responsible for
resizing the application screen according to each device (SPURLOCK, 2014).
Fig. 6 shows the online mode of the application, this mode is
responsible for loading the online map page.
Fig. 6 shows the options: a) map with the bus stop clusters; B) map with
bus stops and bus location; C) information of the bus stop.

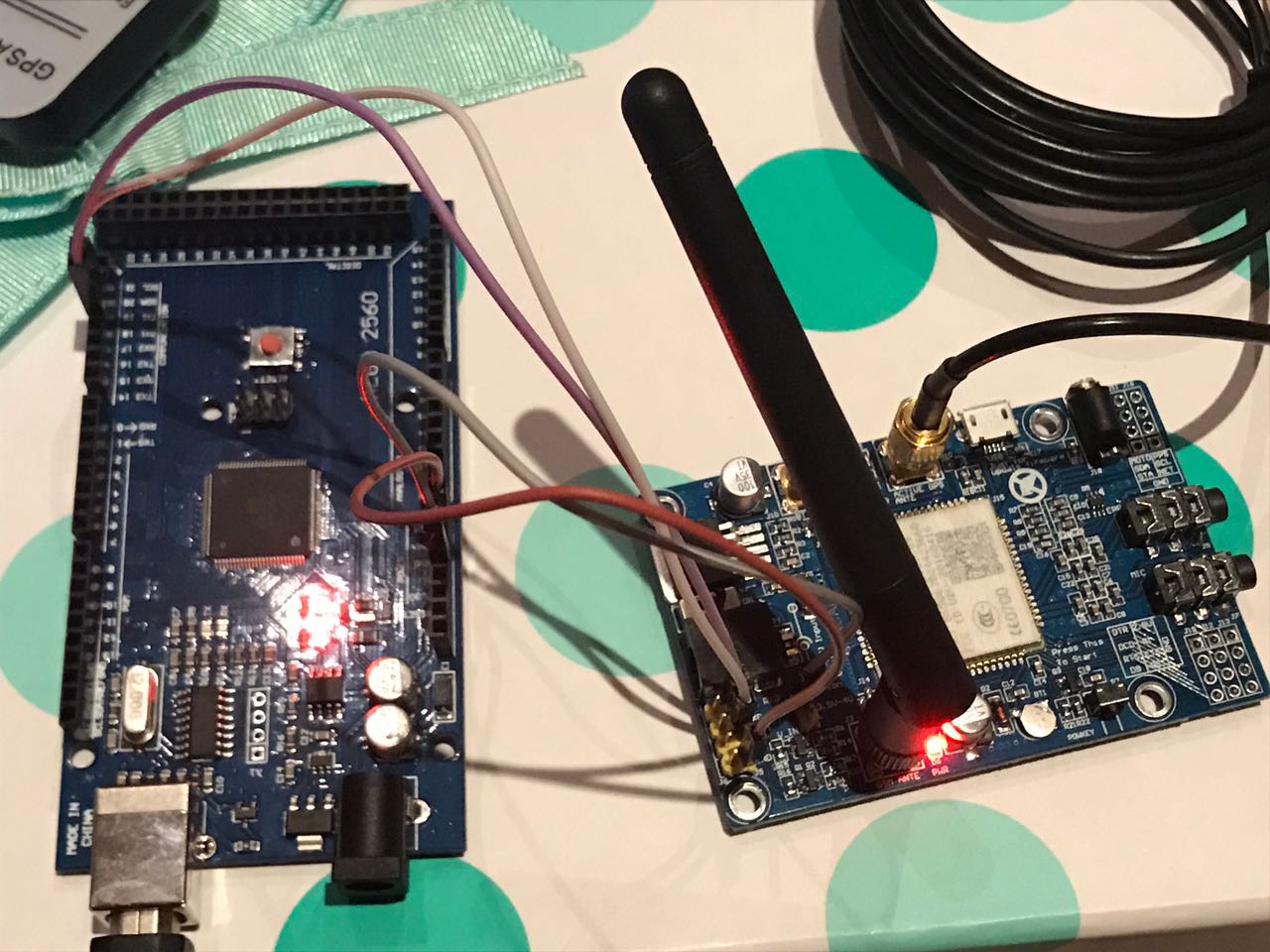
3.5. Development and installation of hardware
Fig. 7 shows a picture of the hardware used. The SIM 808
module was attached to Arduino UNO via a shield. An acrylic box was involved to
protect the circuit from dirt and water, avoiding damaging the board. The total
price of the hardware was approximately U$ 100.00.

Fig.7. Hardware used in this project.
The flowchart of Fig. 8 illustrates the operation of the
developed embedded system. The implementation of the embedded system was
divided into five stages. The stages were: connect SIM808 module, start GPS,
start GPRS, get GPS position, send position through GPRS. One stage could only
proceed to the next if the current one was executed without error. In the
programming of the embedded system, several problems occurred due to incorrect
configurations of GPS and GPRS. To identify the errors in the settings, the
serial output of the SIM808 module was used, so it was possible to identify the
error returned by the SIM808.

Fig.8. Flowchart of the operation of the embedded system.
To start the hardware it is necessary to initialize the module
elements. Three elements are initialized: the SIM808 board, GPS module and GSM
module. To start the SIM808 it is necessary to press the I/O button on the
SIM808 board for 3 seconds, then a simple AT command from the microcontroller
to the SIM808 is sent, if the return is "OK", then the board is
connected correctly. After the GPS module is connected, the satellites are
triangulated. In the configuration of the GSM module is necessary to set the Access
Point Name (APN) of the internet provider, user and password. After the correct
initialization and configuration of these modules it is possible to obtain the
GPS position and send it to the server through the GSM network.
3.5. Pilot project
In order
to verify if the system would work satisfactorily, a test of the developed
system was carried out with a bus in the urban line of the city of Bagé-RS,
Brazil. A mobile network carrier that provides GPRS service in the city was
used, the choice of this carrier was based on the quality of the GPRS signal.
The tracker was then connected to the electrical system in the vehicle that Supplied 12 volts.
For four
days, the tracker sent the bus position to the server. During this period more
than fifty thousand records were stored in the database. Every 3.95 seconds the position of the bus to
the server was sent, this sampling was adequate for the visualization of the
moving vehicle on the map. In the experiments, 1MB/hour of data was spent, so
if the bus operates for 16 hours/day, in 1 month 480MB of data would be used.
Fig. 9
indicates the location where the tracker was installed. It was attached next to
the driver's cab and the electronic control unit of the vehicle.

Fig.9. Hardware installed close to the driver's cab.
The data
generated by the tracker was collected and stored in the database. The data
stored were: latitude; longitude; altitude; date/time, number of satellites
located and speed.
For the calculation of the vehicle arrival time at the requested
bus stop, the average speed of 18 km/h was utilized, as proposed in Meirelles
(2000). The calculation of the vehicle arrival time is carried out by dividing
the distance between the bus’ current position and the bus stop by the speed
proposed by Meirelles (2000). The experimental average speed of the line
studied was 14.90 km/h, so the predictability of the bus arrival will be
advanced. This anticipation favors the passenger arriving at the stop in
advance.
From the positions and velocities collected, the map in Fig.
10 was plotted utilizing RapidMiner Studio program.

Fig.10. Map of the route made by the bus with the speeds.
It can be seen in Fig. 10 that on straight roads, the bus had
higher speeds (in yellow). This kind of information can be useful for managers
to control the speed in order to avoid accidents and tickets for speeding. In
addition, the information can be incorporated into an algorithm and used to
improve the predictability of the bus arriving at the bus stop.
In Fig. 11, the
maximum velocities were plotted during the daytime hours. In the graph of this
figure, it is possible to check two peaks. The first peak shown is the speed
between 11am and 2pm. The other peak velocity was verified between 4pm and 8pm.
These peaks can occur due to the congestion of lunch as well as the closing of
stores and the beginning of classes at the universities. In this way, the
drivers compensate the hours spent in the congestion, increasing the speeds on
the roads. Through this type of chart, managers can determine the times to make
more buses available.

Fig.11. Maximum speeds distributed during hours.
4. Discussion and conclusion
The main objective of this work was the development of a
tracking system to assist in alleviating the problem of unpredictability of bus
arrival time. For this, a Web system and an App, capable of obtaining current
bus positions, were developed. After the development of the Web system and App,
the embedded system was attached to a bus to obtain the vehicle position and to
send that information to a server.
Different
technologies were used for the development of the Web system and the
application. Some of these technologies were Django, Bootstrap and Leaflet.
They streamlined the development of the system and ensured good structuring of
the project. With the good organization of the codes, it was possible to reuse
a large part of the functions. For example, database queries were developed on
the web server, so both the webpage and the application accessed the same
queries.
The hardware behaved as expected, which made it possible
to track the bus by the application and estimate the bus arrival using an
average speed of 18 km/h based on the Meirelles (2000) work.
In addition to providing the location of the bus in real
time for passengers through the data collected, it was possible to generate
knowledge for the company manager. Thus, the company manager can make concise
decisions to improve efficiency of the fleet. Besides the graphs plotted in
this work, other information can be correlated with the position of the vehicle
such as drivers and buses, thus making it possible to extract more information.
Through the planning and management of the fleet, it
becomes possible to create new means of organization for public transport
companies. From the use of a tracking system, it is possible to have greater
control over a particular line or fleet, both by the company and by the
passenger. It is also possible to determine the time of arrival of a bus to the
next stop, the time of the route, in which stops the bus did not stop, average
speed, etc.
All requirements previously formulated were met and the
entire system worked in an acceptable manner. However, due to the high cost of
implementing of the GPS/GSM modules, for future work, the acquisition of
commercially available trackers should be considered. In the market, trackers
that meet the requirements system were found with values ranging from U$15.00
to U$ 30.00.
Besides the technical knowledge acquired during the
research and development of the system, it was possible to verify the need for
improvements in this sector, and one of the ways to improve public
transportation would be through technological tools. Therefore, it is expected
that passengers can benefit from these technologies in improving the quality of
public transport services. The code is available on https://github.com/rodrigowindows.
Acknowledgment
The authors thank the Coordenação de Aperfeiçoamento de
Pessoal de Nível Superior (CAPES), for financial support.
References
[1] LERNER,
J. Avaliação comparativa das modalidades de transporte público urbano. Nacional
das Empresas de transporte Urbano, 2009.
[2] DENATRAN,
D. N. DE T.-. Frota municipal de veículos. Brasília, 2015.
[3] ANTP,
A. N. DE T. P.-. Sistema de Informações da Mobilidade Urbana Relatório Geral
2013. São Paulo, ANTP, 2013.
[4] MAGALHÃES, C. T. DE A. AVALIAÇÃO DE
TECNOLOGIAS DE RASTREAMENTO POR GPS PARA MONITORAMENTO DO TRANSPORTE PÚBLICO
POR ÔNIBUS. Rio de Janeiro, 2008.
[5] BYANSHUL SRIVASTAVA; EMARKETER. 2
Billion Smartphone Users By 2015 : 83% of Internet Usage From Mobiles [Study].
Availabe in:
.
Acesso em: 23 abr. 2016.
[6] Maurya, K., Singh, M., & Jain,
N. (2012). Real Time Vehicle Tracking System using GSM and GPS Technology-An
Anti-theft Tracking System. International Journal of Electronics and Computer
Science Engineering, 1, 1103–1107. Retrieved from
http://www.estdl.org/wp-content/uploads/2012/08/Volume-1Number-3PP-1103-
1107.pdf.
[7] Dinkar, A. S., Shaikh, S. a, &
Significance, P. (2011). Design and Implementation Of Vehicle Tracking System
Using, 1(3), 1–7.
[8] Chadil, N., Russameesawang, A.,
& Keeratiwintakorn, P. (2008). Real-Time Tracking Management System Using
GPS , GPRS and Google Earth. Proceedings of ECTI-CON 2008, 393–396.
http://doi.org/10.1109/ECTICON.2008.4600454.
[9] HEGARTY, C. J. GNSS signals - An
overview. 2012 IEEE International Frequency Control Symposium, IFCS 2012,
Proceedings, 2012.
[10] WESTERMO. Industrial Data
Communication Westermo Handbook Theoretical and General Applications.
Eskilstuna, Sweden: Westermo, 2005.
[11] RICHARDSON, L.; RUBY, S. RESTful Web
Services. Nova York: O’Reilly Media, 2008.
[12] SPURLOCK, J. Bootstrap. Simon St. ed.
Sebastopol, CA: O’Reilly Media, Inc, 2014.
--> [13] Meirelles, A Review of Bus Priority Systems in Brazil: from Bus Lanes to Busway Transit:SMART URBAN TRANSPORT